



技术资料
-
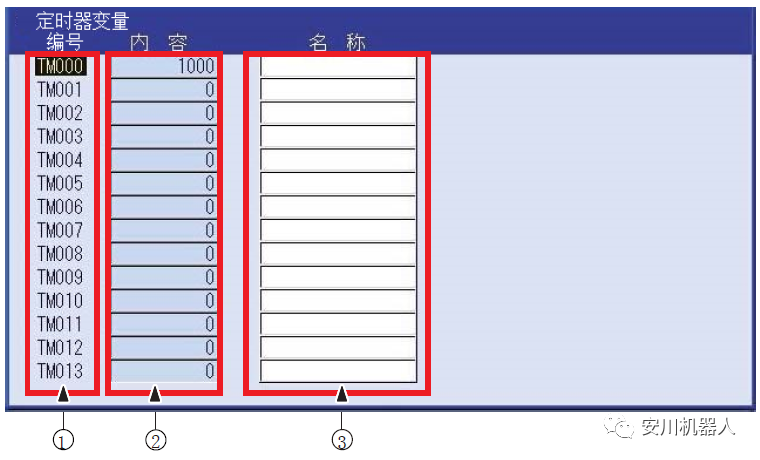
安川机器人节拍时间测算功能
04-082024功能介绍 时间测算功能是指对程序指定区间的运行时间和指定信号的输出时间的检测功能。通过时间测算功能得到的结果全部保存在定时器变量中。在......
-
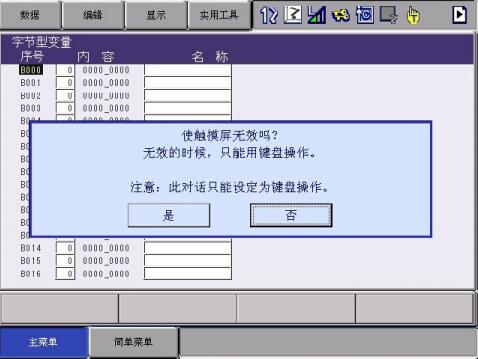
安川机器人触摸屏无效该怎么解决
02-182024示教编程器触摸屏无效化功能示教编程器触摸屏无效化功能是指即使点击触摸屏也不能进行操作(只有按键有效)。即使触摸屏发生故障,只要设定触摸屏无效化功能设置为有效,......
-
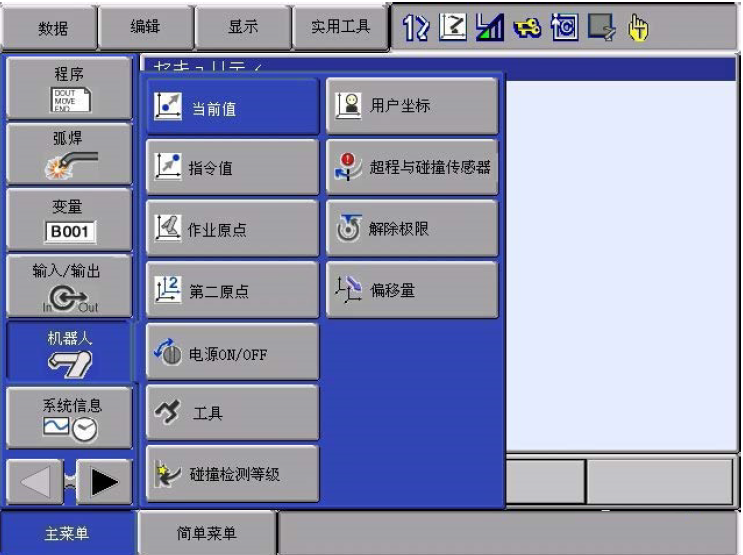
安川机器人-第二原点位置
01-242024第二原点位置 【第二原点位置】是作为***数据的检查点而设定的。主要目的是机器人通电前后检查马达编码器的***值旋转数据,若不一致时......
-

安川机器人报警代码报警代码系列-27(8211)解决方法
01-1620241、安川机器人报警界面 控制柜:YRC1000 备注:该报警发生前,根据经验一般会先发生【0320】的报警: ......
-
安川机器人-焊接注意事项
12-282023安川机器人-焊接注意事项 一、在用安川焊接机器人进入实验前 1、进入实验室时,实验室人员,应在模具,做好防护措施付诸表决。......
